ROS(12):双足机器人开发调研
本文共 860 字,大约阅读时间需要 2 分钟。
本文的原文连接是: 未经博主允许不得转载。
博主地址是:1,关于双足机器人
研究这个比较难,之前组装了小车。感觉不过瘾,所以要选择一个比较难的。
对双足机器人兴趣比较大。 首先要讲讲robo-one,一个日本(不谈政治)双足机器人比赛,2003年就开始了。 机器人比赛:
机器人比赛: 
 京东上面有关于双足机器人的书籍。
京东上面有关于双足机器人的书籍。  里面介绍的全部都是双足机器人。 书上讲的是日本的情况,而且robo-one的比赛是使用遥控器的。 比赛的目的是击败对方。要求单腿离地,5秒钟走10步。
里面介绍的全部都是双足机器人。 书上讲的是日本的情况,而且robo-one的比赛是使用遥控器的。 比赛的目的是击败对方。要求单腿离地,5秒钟走10步。 ROBO-ONE决赛 GAROO获得两连冠
2,材料
已经确定双足机器人的主要材料要使用舵机。因为扭力大,控制简单。
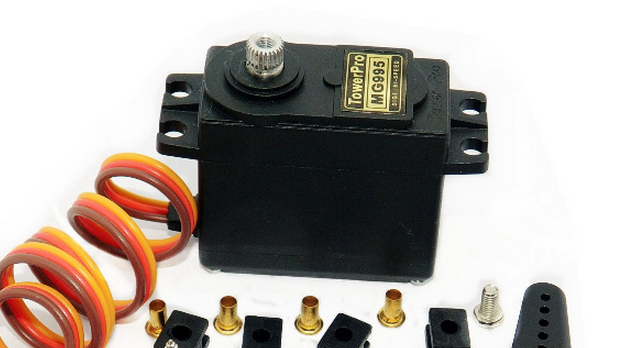 首先要购买便宜好用的舵机。 国产的只能选择盛辉舵机了。扭力比较大,价格比较便宜。 淘宝搜索一大堆,真假分不清,比较混乱。
首先要购买便宜好用的舵机。 国产的只能选择盛辉舵机了。扭力比较大,价格比较便宜。 淘宝搜索一大堆,真假分不清,比较混乱。 然后需要购买舵机支架,也不便宜,几块钱一个,要组装起来两条腿也需要100 多块钱。
 最后组装成一个真正的铁家伙,和这个类似吧。
最后组装成一个真正的铁家伙,和这个类似吧。 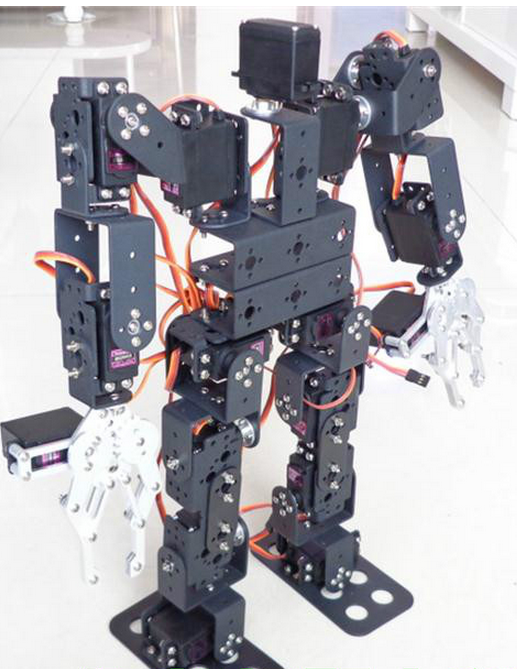
3,没有挑战
这样仅仅从淘宝上面就能直接购买零件,组装成一个机器人,然后自己在用树莓派开发程序。
但是这样感觉不是在做机器人,没用挑战,使用的是现成的支架。 一点设计感都没有,只是增加了动手能力,和组装小车没用啥区别。 所以我决定换一个新方案。4,新方案
只购买基础材料,舵机,螺丝等。
然后使用cad软件自己设计机器人腿。设计螺丝孔,设计形状。 然后使用3D打印机打印零件,再组装。 这样可以学到更多知识,搞清楚机器人的原理。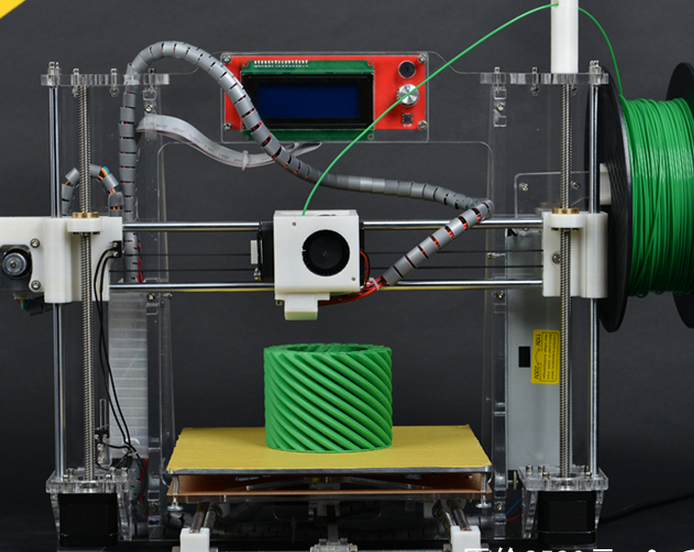 因为3D打印技术的发展,可以买到很便宜的打印机了。 而且,之前研究的国外的开源机器人项目也是使用3D打印的,可以参考下。
因为3D打印技术的发展,可以买到很便宜的打印机了。 而且,之前研究的国外的开源机器人项目也是使用3D打印的,可以参考下。 使用树莓派进进行控制。
5,总结
本文的原文连接是: 未经博主允许不得转载。
博主地址是:开发一个双足机器人,难度非常大,好多东西都需要学习。
但是这样才锻炼人,选择一个自己非常刚兴趣的东西研究,非常高兴。 我的目标不是竞赛,不是完成作业,我是要自己开发一个机器人。 过程是我的乐趣,而不是结果。 有志同道合的童鞋可以继续关注我的博客。
你可能感兴趣的文章
org.openqa.selenium.StaleElementReferenceException
查看>>
Android Intent传递对象为什么要序列化?
查看>>
数论之 莫比乌斯函数
查看>>
linux下查找某个文件位置的方法
查看>>
python之MySQL学习——数据操作
查看>>
Harmonic Number (II)
查看>>
长连接、短连接、长轮询和WebSocket
查看>>
day30 模拟ssh远程执行命令
查看>>
做错的题目——给Array附加属性
查看>>
Url.Action取消字符转义
查看>>
JQuery选择器大全
查看>>
Gamma阶段第三次scrum meeting
查看>>
python3之装饰器修复技术@wraps
查看>>
[考试]20150606
查看>>
Javascript_备忘录5
查看>>
Can’t create handler inside thread that has not called Looper.prepare()
查看>>
敏捷开发方法综述
查看>>
Hadoop数据操作系统YARN全解析
查看>>
修改数据库的兼容级别
查看>>
Windows下同时安装两个版本Jdk
查看>>